Drop-Box Robot
A combat robot designed for the Tufts Robotics Team combat robot competition.
Team attribution
Andrew Schretzmayer – Will Lapthorn – Jack Geraghty

The Story

What to do, what to do.
Initial sketches depicted Drop-box as a flipper robot built around a geared servo to launch 4lb robots into the air, though last-minute changes tested our creativity and adaptability.
CAD. Kinda.
We designed Drop-box in Onshape for easy collaboration, tackling the entire CAD process in just days. The rush taught us valuable lessons about planning and avoiding last-minute design challenges. In the end the CAD was janky but got the job done.

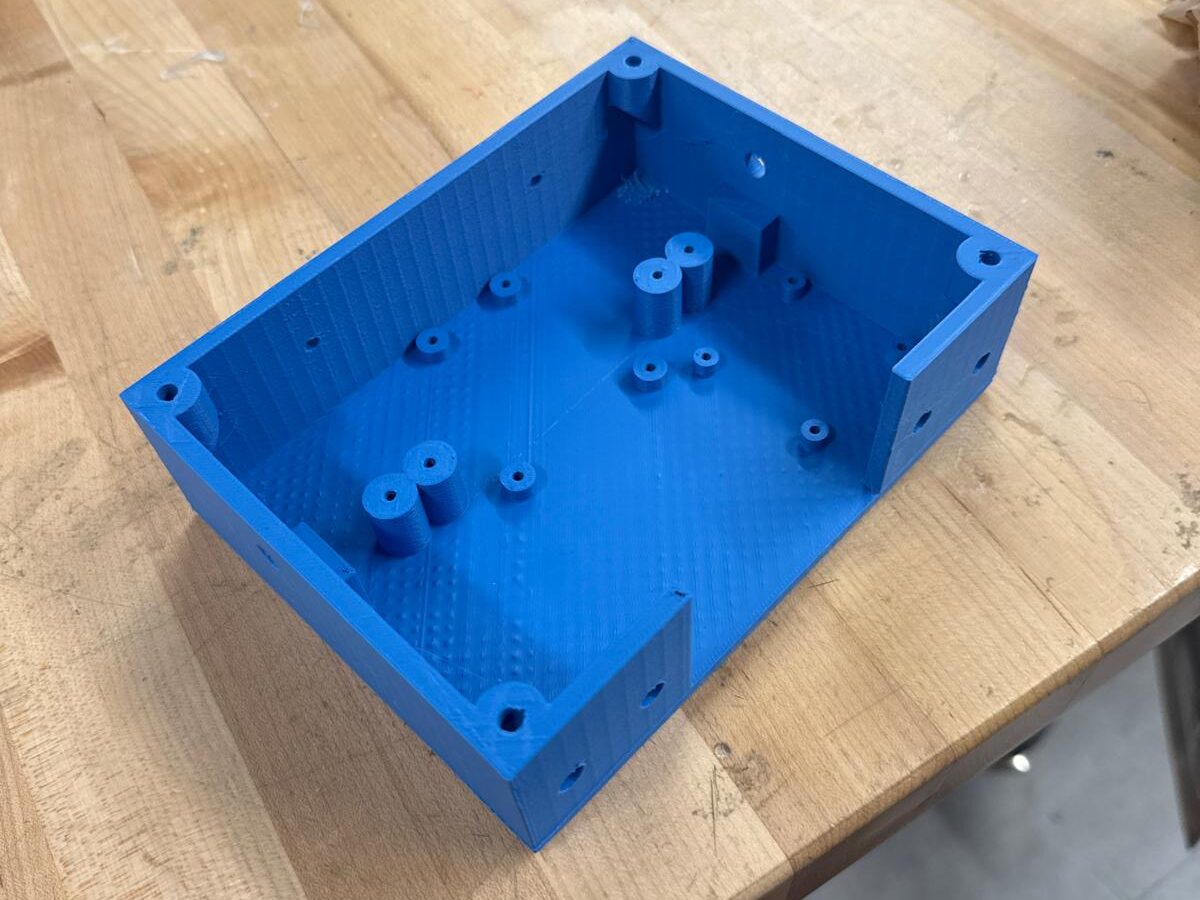
Makin it fast.
Manufacturing Drop-box began just three days before the competition. The chassis was 3D printed, while the flipper and armor parts were made from waterjet aluminum, bent to shape. Tight deadlines pushed us to improvise, especially with last-minute acrylic gears that ended up costing us more headaches.
Time to fight.
On competition night, Drop-box faced its challenges but held its own. Despite losing in the first round, we were thrilled it moved and flipped proving of our teamwork and problem-solving in the final days.
